
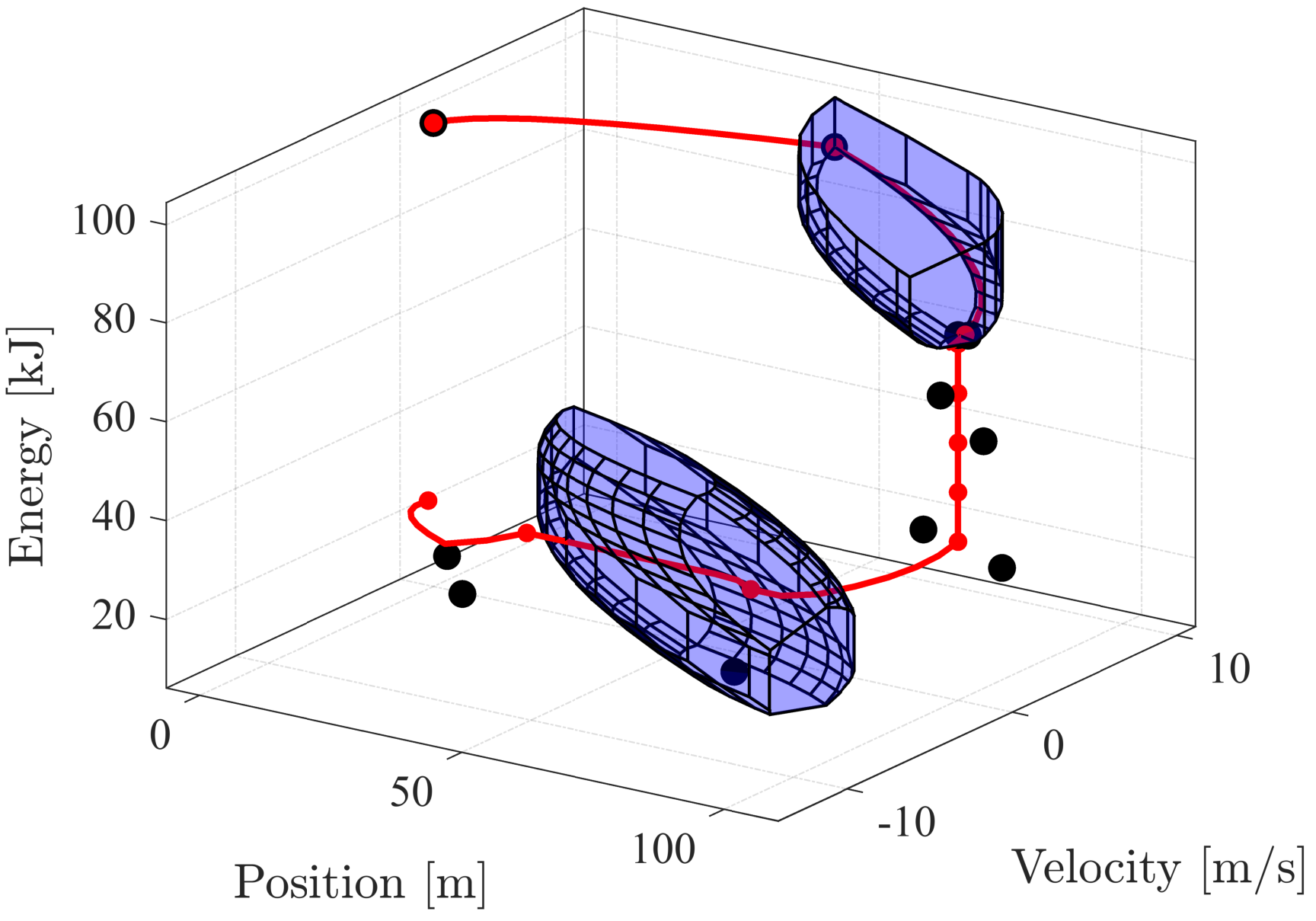
Model Predictive Control (MPC) is a leading approach for the control of constrained systems, where input and state constraints are directly imposed in the underlying optimization problem. Feasibility of these constraints and stability of the closed-loop system are well understood for the case of a single centralized controller. However, for systems that require fast control update rates and long prediction horizons, the time required to solve the resulting large optimization problem may prevent real-time implementation. Alternatively, hierarchical MPC can be used to decompose control decisions across multiple levels of controllers. Generally, upper-level controllers use large time steps to achieve long prediction horizon with a reduced number of discrete steps. Lower-level controllers, with small time steps, have short prediction horizons to minimize computational cost and enable real-time implementation. This work develops a multi-level hierarchical MPC formulation for constrained linear systems. The control formulation guarantees satisfaction of both state and input constraints during operation and terminal state constraints at the end of operation. Coordination between controllers at different levels is achieved through the use of waysets. These waysets form terminal constraints on lower-level controllers that provide flexibility in short-term operation while guaranteeing the long-term ability to satisfy constraints beyond the prediction horizon of these controllers. The waysets are represented as constrained zonotopes to enable computationally efficient on-line calculation. Constraint satisfaction is proven for a hierarchy with an arbitrary number of levels.
Relevant Publications:
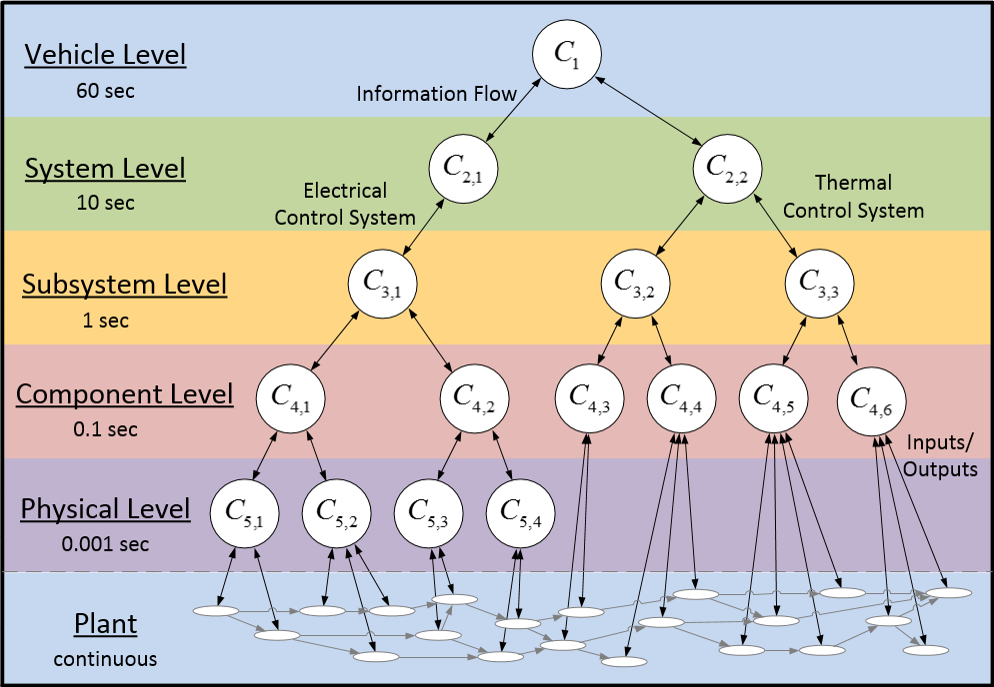
Modern vehicles are a heterogeneous mix of complex interconnected systems of various energy domains. This research develops a hierarchical model-based control framework to improve system performance and efficiency by optimizing power generation, distribution, storage, and utilization. The structure of the control hierarchy is designed to match the underlying structure of the system. Each Model Predictive Control (MPC) controller utilizes a dynamic model of a corresponding section of the overall systems where lower level controllers use high fidelity models of single components or subsystems while upper level controller use lower fidelity models of entire systems or the vehicle. Additionally, lower level controllers make control decisions on a fast update rate in order to provide fast response times and disturbance rejection, while the upper level controllers make control decisions on a slow update rate in order to allow these controllers to preview far into the future to better prepare the system for upcoming tasks and known disturbances. Coordination between various subsystems and timescales is achieved through top-down and bottom-up communication between these controllers, allowing global, system-wide, objectives to be met utilizing distributed decision making.
Relevant Publications:
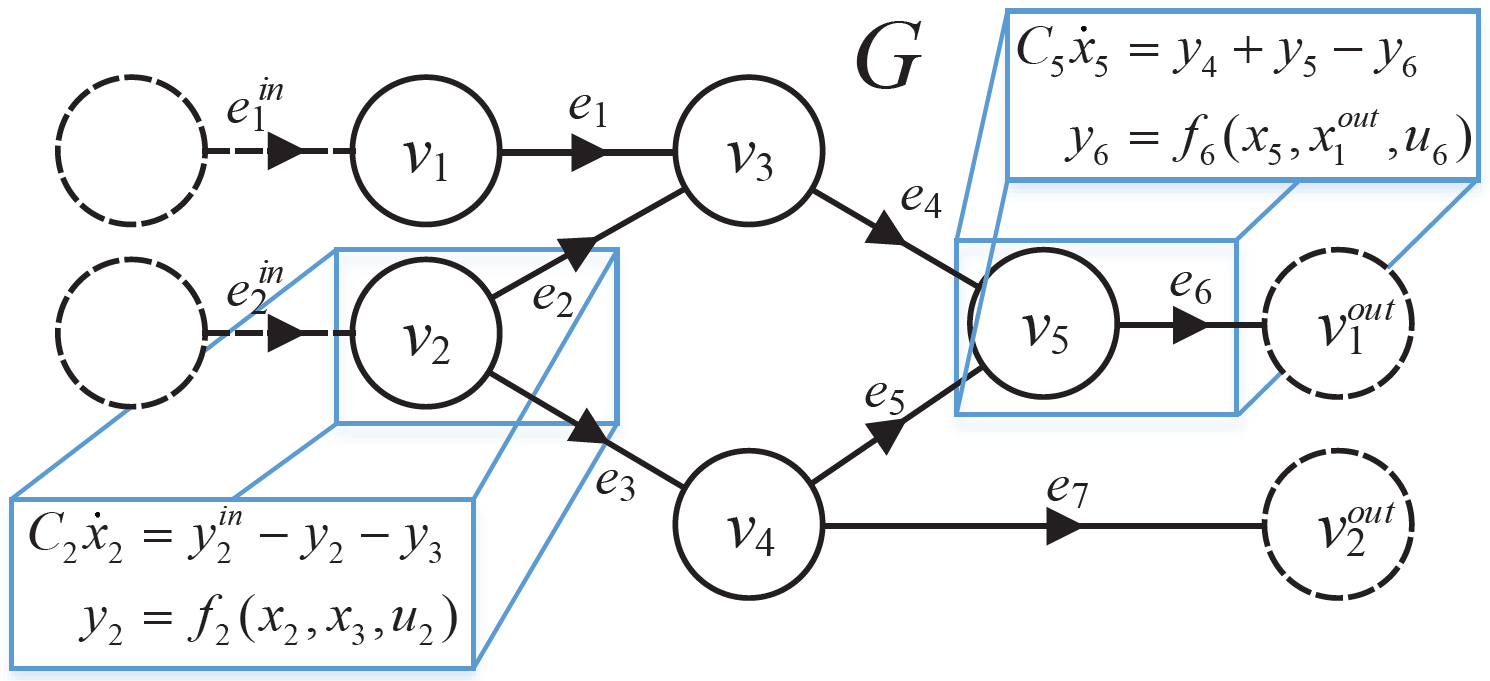
Model-based control design has the ability to meet the strict closed-loop control requirements imposed by the rising performance and efficiency demands on modern engineering systems. While many modeling frameworks develop control-oriented models based on the underlying physics of the system, most are energy domain specific and do not facilitate the integration of models across energy domains or dynamic time-scales. This work develops a graph-based modeling framework, derived from the conservation of mass and energy, which captures the structure and interconnections in the system. This framework is energy-domain independent and inherently captures the exchange of power among different energy domains. When modeling a system as a graph, capacitive elements that store energy, or mass, are represented as vertices and the paths for the transport of energy, or mass, between storage elements are represented as edges. Both linear and nonlinear graph-based models have been experimentally validated and are capable of capturing the temperature and pressure dynamics in thermal and hydraulic systems, respectively.
Relevant Publications:
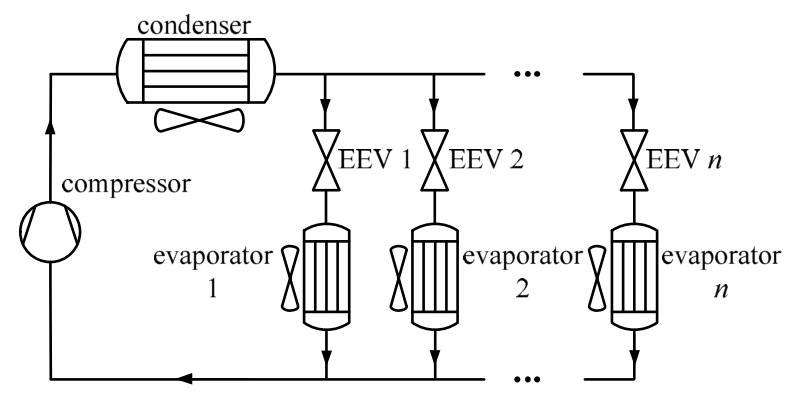
Multi-evaporator vapor compression systems (ME-VCSs) are becoming widely used to meet the cooling needs for multiple thermal loads via a single system. As the number of evaporators increases, the size of these systems can make a centralized control approach impractical and computationally expensive; thus, motivating a decentralized control design. Linear gray-box modeling techniques show that ME-VCSs have a distinct underlying structure between the actuators and dynamic states known as a block arrow structure (BAS). This structure captures the high degree of coupling found in ME-VCSs, which can lead to poor decentralized control performance. This work develops a partially decentralized model predictive control strategy which directly considers the coupling in the system when making control decisions by exploiting the BAS. The gray-box modeling approach and the decentralized nature of this BAS control strategy prove scalable to n-evaporator systems. Through simulated case studies, it is shown that this BAS control strategy can approximate the performance of a centralized control approach for ME-VCSs while significantly reducing computational costs.
Relevant Publications:
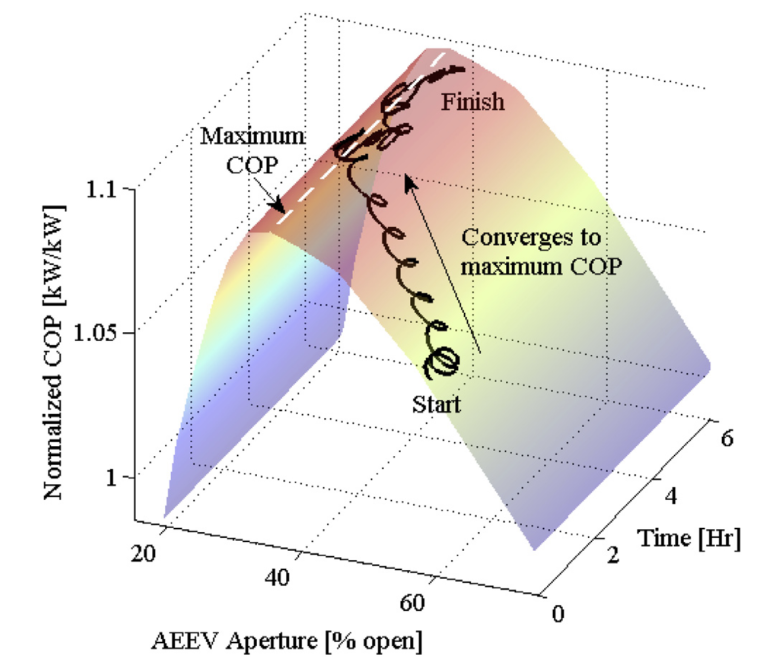
With vapor compression systems consuming a significant portion of the overall U.S. energy consumption each year, extensive efforts have been made toward the development of control strategies which aim to maximize system efficiency while providing the desired cooling. However, previous control strategies under-utilize a degree of freedom corresponding to the amount of refrigerant in the system, which is related to condenser subcooling and can significantly affect system efficiency. In this work, an alternative system architecture, which utilizes a receiver and an additional electronic expansion valve, is used to provide independent control of condenser subcooling. Simulation and experimental results show there exists an optimal subcooling that maximizes system efficiency; however, this optimal subcooling changes with operating conditions. Therefore, extremum seeking control is implemented to find the optimal subcooling in an adaptive, model-free manner. Experimental results demonstrate a 9% increase in efficiency using the alternative architecture and extremum seeking control.
Relevant Publications: